Насекомые-киборги могут звучать как научная фантастика, но это относительно новая разработка, которая использует электрические стимулы для управления движением насекомых. Эти гибридные компьютерные роботы-насекомые, как их научно называют, предвещают будущее небольших, высокомобильных и эффективных устройств.
Однако, несмотря на значительный прогресс, дальнейшие успехи осложняются огромными различиями между нервной и мышечной системами разных насекомых.
В недавнем исследовании, опубликованном в журнале eLife, международная исследовательская группа изучила взаимосвязь между электрической стимуляцией мышц ног насекомых-палочек и результирующим крутящим моментом (силой скручивания, которая заставляет ногу двигаться).
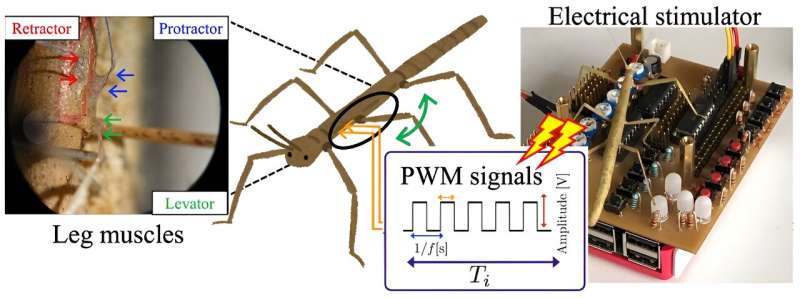
Группа сосредоточилась на трех мышцах ног, которые играют важную роль в движении насекомых: одна для движения, другая для жесткости суставов и одна для перехода между стоянием и размахиванием ногой. Эксперименты включали в себя то, что исследователи держали тело насекомых-палочников неподвижным и электрически стимулировали одну из трех мышц ног, чтобы производить движения, похожие на ходьбу.
Исследование было проведено Дай Оваки, доцентом кафедры робототехники Высшей инженерной школы Университета Тохоку. Эксперименты проводились в Билефельдском университете, Германия, в лаборатории, которой руководили профессора Фолькер Дюрр и Йозеф Шмитц.
Зависимость между временем ввода электростимуляции и крутящим моментом, создаваемым в суставах (пример для мышцы-леватора у 10 животных), показывающая линейную зависимость в области до 500 мс. Фиолетовое затенение указывает на распределение, предсказанное иерархической байесовской моделью. Различия между индивидуумами прогнозируются с высокой точностью. Автор: Дай Оваки
«Основываясь на наших измерениях, мы могли бы создать модель, которая предсказывала бы создаваемый крутящий момент, когда к мышце ноги применялись различные схемы электрической стимуляции», — указывает Оваки. «Мы также определили почти линейную зависимость между продолжительностью электростимуляции и создаваемым крутящим моментом, то есть мы могли предсказать, какую силу скручивания мы создадим, просто посмотрев на длину приложенного электрического импульса».
Используя всего несколько измерений, Оваки и его сотрудники смогли применить это к каждому отдельному насекомому. В результате этих результатов ученые смогут усовершенствовать моторный контроль настроенных биогибридных роботов, сделав их движения более точными.
Хотя команда знает, что их идеи могут привести к созданию адаптируемых и мобильных устройств с различными приложениями, они по-прежнему ссылаются на некоторые ключевые проблемы, которые необходимо решить. «Во-первых, модельное тестирование должно быть реализовано на свободно передвигающихся насекомых, а электрические стимулы должны быть усовершенствованы, чтобы более точно имитировать естественные нервно-мышечные сигналы», — добавляет Оваки.